← RETURN TO BASE
Study Table Organizing Robotic Arm
Merging computer vision and robotics to automate the organization of pens and pencils on study tables using TensorFlow-powered object detection and precision servo control.
Merging computer vision and robotics to automate the organization of pens and pencils on study tables using TensorFlow-powered object detection and precision servo control.
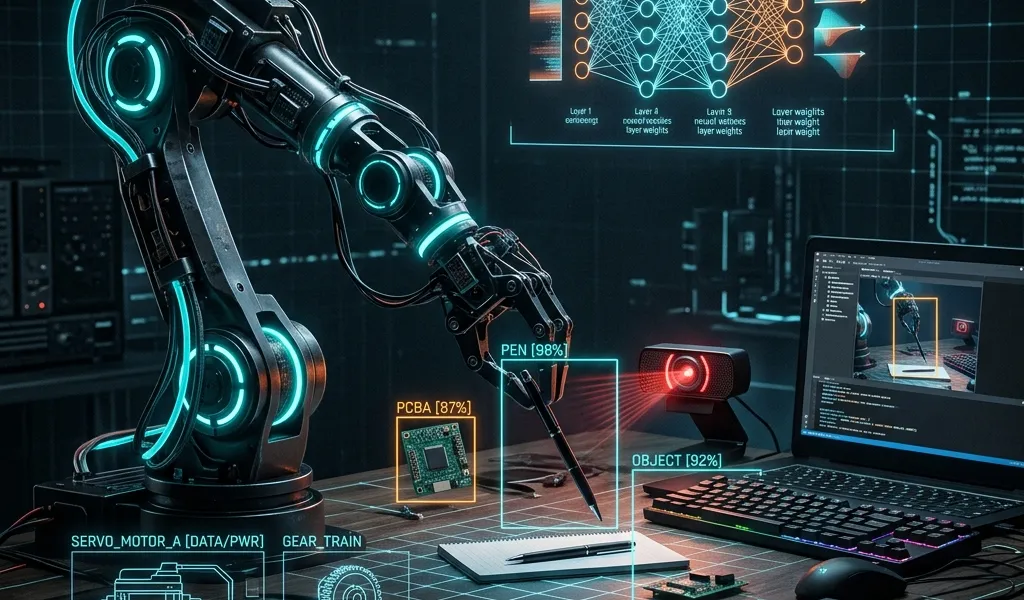
This project merges computer vision and robotics to automate a surprisingly common task — keeping a study table organized. The robotic arm autonomously detects pens and pencils scattered on a desk, picks them up, and places them neatly in a holder.
Using an HD webcam for image capture, a TensorFlow-trained model for object detection, and custom algorithms for coordinate determination and servo motor control, the system achieves end-to-end automation from detection to placement.
Built as an academic project at the University of Colorado Denver, it demonstrates practical applications of ML-powered robotics in everyday environments.
HD webcam captures high-resolution images of the study table surface in real-time.
TensorFlow model trained to accurately recognize and classify pens and pencils from the captured frames.
Custom algorithm determines precise object coordinates in 3D space relative to the robotic arm base.
Python serial communication drives precise servo motor movements for arm positioning.
Robotic claw activates to grip the detected pen with controlled force.
Algorithm determines pen holder location and the arm places objects with precision.
This system was designed and developed as an academic project at the University of Colorado Denver under the supervision of Professor Dr. Mazen Alborno. I extend my gratitude for his invaluable technical guidance, mentorship, and for supporting access to the robotic arm hardware essential for completing this project.